







Beschreibung
Während der Entwicklung der SLSS CANAnalyser* CAN-Bus Software benötigte ich mehrere Arduino Uno R3* Micro-Controller Boards inkl. angeschlossener MCP2515 CAN Bus Shields*, um die Kommunikationschnittstelle mit dem Computer entwickeln, testen und debuggen zu können. Da jedes der CAN-Boards bereits 7 JumperWires* für den Anschluss an den Arduino benötigt und die beiden CAN-Verbindungsleitungen zwischen den Controllern auch noch dazugekommen sind, sah es auf meinem Basteltisch ziemlich „chaotisch“ aus und das obwohl ich nicht wirklich viel mit den Boards machte (ich arbeitete ja an der Software). Noch schlimmer wurde es, als ich den Aufbau, um für ein anderes Projekt platz zu haben, auf die Seite räumen musste. Dabei lösten sich zum Teil die Anschlussleitungen am CAN-Board, am Arduino oder gleich auf beiden Seiten und ich musste diese jedes Mal neu verbinden, was dann auf Dauer doch etwas nervig war.
Aus diesem Grund entschloss ich mich dazu ein Halterung zu konstruieren, welche das CAN Board mit dem Arduino verbindet, die Kabel etwas in Zaum hält und mir trotzdem noch die Möglichkeit bietet die übrigen Ein- und Ausgänge des Arduino-Boards frei zu konfigurieren. Jetzt hätte ich zu diesem Zweck natürlich eine Platine bauen können, welche das CAN-Board aufnimmt und auf den Arduino Uno* aufgesteckt wird. Dies habe ich in der Vergangenheit schon des Öfteren gemacht und das hat auch immer super funktioniert. In diesem Fall wäre es jedoch zum aktuellen Zeitpunkt unnötig gewesen, da ich sowieso die Idee habe für die CAN-Software ein passendes Hardware-Layout zu erstellen. Diesen Schritt möchte ich mir allerdings für die fertige Software aufheben, da ich dann genau weiß, was ich wie und wo umsetzen möchte. Um nun doch ein wenig Ordnung in meinen Versuchsaufbau zu bekommen und die Boards auch „mobil“ nutzen zu können, habe ich mich also für das Erstellen einer Halterung für den 3D-Drucker entschieden.
Auch für andere Projekte universal einsetzbar
Schon bei meinen ersten Überlegungen kam mir die Idee die Halterung so zu gestalten, dass man diese vielleicht auch für andere Anwendungsbereiche oder Projekte wiederverwenden können sollte. Um die Pins des Arduino weiterhin frei zugänglich zu belassen, war die erste Idee eine L-förmige Konstruktion, welche am Arduino-Board eingerastet wird und das CAN-Board dann Hochkant aufnimmt. Diesen Aufbau verwarf ich allerdings nach ein paar ersten Versuchen, da mir die Stabilität nicht wirklich zusagte und auch die Bauhöhe unnötig groß war.
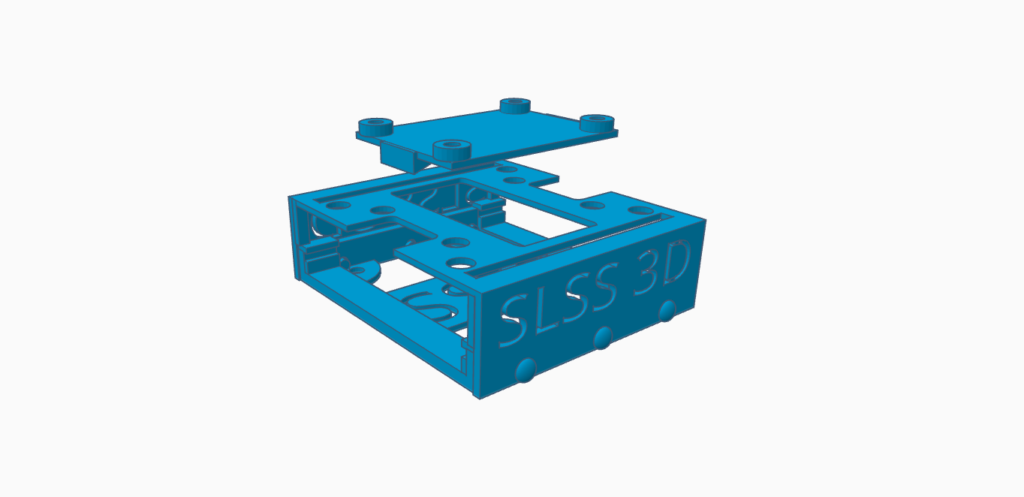
Ich entschloss mich dann doch dazu eine Art „Käfig“ um den Arduino zu konstruieren und das CAN-Board direkt oberhalb des Arduinos zu platzieren. Den Grundrahmen habe ich in Ober- und Unterteil aufgeteilt, was das Drucken und auch Montieren der Teile erleichtert. Die Oberseite gestaltete ich dabei so, dass ich zusätzliche Halterungen oder Träger für Bauteile sowohl durch einfaches Aufstecken, als auch mittels Schraubverbindung darauf befestigen kann.
Für das CAN-Board konstruierte ich einen solchen Adapter. Das CAN-Board wird auf die Adapterplatte geschraubt und diese anschließend auf das Oberteil des Rahmens gesteckt, wo sie mit 2 Nasen eingerastet und durch die Schraubenköpfe in Position gehalten wird. Anschließend werden die Leitungen durch das Gehäuse verlegt, was den Vorteil hat, dass diese nicht mehr unnötig weit nach oben herausstehen.
Screenshots
Screenshots des 3D-Entwurfes & der gedruckten Halterungen
Fazit
Dieses Gehäuse ist vielleicht nicht die aufwändigste Konstruktion, doch zeigt es einmal mehr, wie man mit dem 3D-Drucker schnell und auf einfache Art und Weise alltägliche „Probleme“ lösen kann. Hat man erste einmal einen 3D Drucker zuhause stehen, findet man auch immer wieder Anwendungsmöglichkeiten, um sich den Alltag zu erleichtern.
Für die Nahe Zukunft plane ich die Verbindung zwischen ober und Unterteil so abzuändern, dass diese nicht mehr, so wie jetzt, mittels kleiner Steck-Bolzen zusammengehalten werden, sondern über ein einseitig angebrachtes Scharnier. So wird es möglich das Gehäuse aufzuklappen, falls man doch einmal näher an den Micro-Controller ran möchte. Wenn ich diese Änderung umgesetzt habe, werde ich dies in diesem Beitrag ergänzen.
Download Arduino Universalhalterung
Hinweis: Da es mit den *.ZIP Dateien evtl. zu Problemen beim Download kommen kann (ZIP-Archive werden in einigen Web-Browsern als potentielle Bedrohung erkannt und der Download blockiert), stelle ich die Datei sowohl als *.ZIP, als auch als *.7z zur Verfügung. Für die letztere Datei benötigt man das kostenlose Kompressionsprogramm 7-Zip* was hier* heruntergeladen werden kann. (https://www.7-zip.de/).
Download “Arduino Universalhalterung (Zip-Archiv)” Halter-Arduino-CAN-Board.zip – 50-mal heruntergeladen – 280,84 KB Download “Arduino Universalhalterung (7-Zip-Archiv)” Halter-Arduino-CAN-Board.7z – 30-mal heruntergeladen – 160,55 KB