






CAN-Bus Analyse-Toolkette für die SeRoSys CAN-Dongle
Der SLSS CANAnalyser ist die direkte, schnelle und zuverlässige Lösung, um CAN und CAN FD Botschaften zu erfassen, zu visualisieren und natürlich zu senden.
Entwickelt für den Einsatz im Labor, im Fahrzeug und in der Produktion, verbindet er eine aufgeräumte Oberfläche mit leistungsfähigen Funktionen im Hintergrund. Ganz gleich ob einzelne Nachrichten inspizierst, komplette Fahrzyklen aufzeichnest oder automatisierte Tests durchgeführt werden sollen – der SLSS CANAnalyser bringt Sie ohne Umwege ans Ziel.
Mir den passenden CAN-Dongles von SeRoSys Technology LLC* bietet der SLSS CANAnalyser Dual-CAN in Echtzeit, 1 µs Zeitstempel, DBC-Live-Signale, leistungsfähiges Logging & Playback, TCP/IP-API Interface und vieles mehr!
Der Einstieg in die Welt der CAN-Analyse dauert nur wenige Minuten
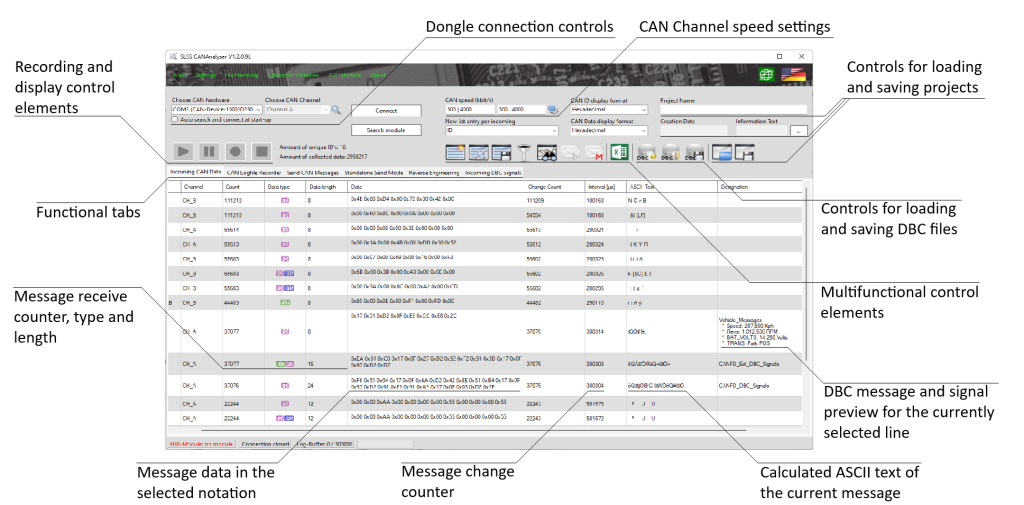
Installation und Erst-Konfiguration des SLSS CANAnalyser sind bewusst unkompliziert gehalten. Nach dem Einstellen der Bus-Geschwindigkeit und dem Verbindungsaufbau zum Dongle werden standardmäßig die Daten beider Kanäle im gemeinsamen Übersichtsfenster angezeigt. Für alle die von Anfang an tiefer in das Thema CAN-Bus einsteigen möchten, bieten wir unter https://serosys-tech.com/instructional-videos* kurze Video-Anleitungen – vom „Senden der ersten CAN-Botschaft“, bis hin zur Einführung in die Skriptsteuerung. Support-Ressourcen und Updates stehen zentral bereit, sodass Teams zügig arbeitsfähig werden und es auch bleiben.
„Keep It Simple, Stupid“ trotz voller Funktionalität
Im Zentrum der grafischen Oberfläche steht ein klar strukturiertes Live-Trace, das beide Kanäle parallel abbildet und mit farblichen Hervorhebungen, Filtern und einer schnellen Suche arbeitet. So findet man Muster, Anomalien oder Wiederholungen sofort wieder und verschiedene Zeitstempel mit hoher Auflösung sorgen dafür, dass Timing-Effekte präzise bewertet werden können.
Wer mit DBC-Datenbasen arbeitet, wird die nahtlose Signal-Dekodierung schätzen: Rohdaten werden live in die entsprechenden Größen übersetzt – inklusive Einheiten, Skalierung und Offset. Damit wird aus einem Byte-Datenstream eine verständliche, bewertbare Botschaft.

Perfekt abgestimmte und durchdachte CAN Hardware von SeRoSys Technology
Mit der passend auf den Einsatz als flexibles und dennoch kompaktes Bus-Analyse-Tool zugeschnittenen SeRoSys Technology CAN-Hardware*, entfaltet der SLSS CANAnalyser seine volle Stärke.
Die SeRoSys-Dongle sind sowohl für den Schreibtisch oder Prüfstand, als auch den mobilen Einsatz im Fahrzeug designt und bieten zwei unabhängige CAN/CAN-FD-Kanäle mit schaltbarer Terminierung und zwei praktische Sub-D9 Anschlüsse in konträrer Ausführung.
Der innovative Stand-Alone Modus erlaubt es bis zu 40 CAN/CAN-FD Botschaften persistent auf dem Dongle zu speichern und diesen als eigenständigen Bus-Sendeknoten zu nutzen. Die Start-Sendeverzögerung kann dabei genauso einfach wie das botschaftsselektive Sendeintervall auf der Hardware gespeichert werden.
Messen, verstehen, handeln
Der SLSS CANAnalyser ist nicht nur ein Zuschauer am Bus. Du kannst Nachrichten manuell absetzen, wiederkehrende Sequenzen konfigurieren oder ganze Abläufe als Makros speichern – ideal, um reproduzierbar zu testen oder Komponenten zu stimulieren. Für umfangreiche Analysen zeichnet die Software lange und verlustfrei auf. Die aufgezeichneten Daten lassen sich später identisch wiedergeben, vergleichen und exportieren. Praktisch ist der Offline-Viewer: Logs können auch ohne angeschlossene Hardware geöffnet, durchstöbert und dokumentiert werden, was Reviews und Freigaben deutlich vereinfacht.
Automatisieren und integrieren
Wer Tests, End-of-Line-Prüfungen oder Langzeitmessungen automatisieren möchte, hat hierfür zwei Möglichkeiten zur Auswahl:
Zum einen steht eine TCP/IP-Schnittstelle* bereit, über welche die wichtigsten Funktionen des SLSS CANAnalyser „ferngesteuert“ werden können. Die erlaubt die Integration der Software in bestehende Automatisierungslösungen und hat den Vorteil, dass durch das Socket-Prinzip sich die Steuerung auch verteilen lassen – etwa wenn Skripte auf einem Server laufen, während am Prüfstand nur die Hardware steht.
Zum erleichterten Einstieg gibt es außerdem eine direkt nutzbare Python-Klasse*. Das TCP/IP Interface selbst und auch die Python-Klasse sind so gestaltet, dass mit wenigen Zeilen Code Geschwindigkeiten gesetzt, Aufzeichnungen gestartet und im Wünschformat gespeichert, oder auch Nachrichten und DBC-Signale gesendet werden können.
Zum anderen besteht die Möglichkeit über eine API zur J2534-PassThru-Anbindung* bestehende OEM-Werkzeuge einzubinden oder Diagnosestrecken wiederzuverwenden.

Transparente Lizenzen ohne wiederkehrende Gebühren
Einer der größten Vorteile ist der Erwerb einer Lebenszeit-Lizenz mit jedem gekauften CAN-Dongle, ohne das wiederkehrende Lizenzgebühren anfallen, oder Funktions-Abomodelle abgeschlossen werden müssen. Dies macht den SLSS CANAnalyser auch für Firmen und Privatpersonen interessant, welche sowohl Hard- als auch Software nur sporadisch einsetzen wollen, da bis auf die Anschaffung selbst keine weiteren Kosten anfallen.
Für Studenten und Schüler bieten wir des weiteren die Möglichkeit über unser Education-Programm die Software mit Open-Source-Hardware wie Arduino, oder ESP8266 und ESP32 und den dazugehörigen CAN-Boards zu verwenden.
Bezugsquellen SeRoSys-CAN Dongle und Download des SLSS CANAnalyser
Falls wir Sie vom SLSS CANAnalyser und den SeRoSys-CAN Dongles überzeugen konnten, stehen Ihnen folgende Bezugsquellen für die Hardware zur Verfügung:
Deutschland / Europa
e-Vision Instruments Germany https://evision-webshop.de/hersteller/serosys/can-analyzer-exerciser-logger*
USA / Nord-Amerika / Kanada
SeRoSys Technology LLC https://serosys-tech.com/shop*
Download SLSS CANAnalyser Software
SeRoSys Technology LLC https://serosys-tech.com/downloads*
Für spezifische Anforderungen – etwa besondere DBC-Workflows, Produktionsintegration oder die J2534-Anbindung – beraten wir Sie gerne und erstellen gemeinsam das passende Setups aus Software und Hardware. Bitte Kontaktieren Sie uns dazu unter SLSS_Official@langer-sebastian.de*